본 발명은 배관의 외부를 따라 이동하며 비파괴 검사를 수행할 수 있는 배관 외부 검사용 이동 로봇에 관한 것이다.
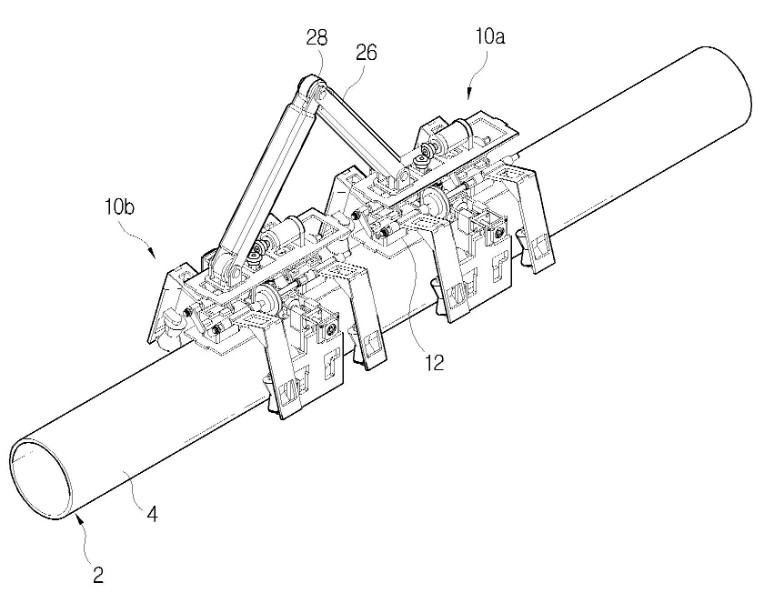
본 발명에 따른 배관 외부 검 사용 이동 로봇은 부착력을 통해 상기 배관의 외면에 부착되고, 추진력을 통해 상기 배관의 외면을 따라 상기 배관의 길이방향으로 이동하거나 상 기 배관의 외면을 따라 회전하는 제1모듈 및 제2모듈과, 하나 이상의 관절 을 가지며, 상기 제1모듈 및 제2모듈을 상호 연결하는 연결부재를 포함하고, 상기 제1모듈 및 제2모듈은 곡관 또는 분기관을 이동하는 경우 어느 하나의 상기 모듈이 상기 배관으로부터 이격되어 이동하는 것을 특징으로 한다.
따라서, 본 발명에 따른 배관 외부 검사용 이동 로봇은 두 개의 동일한 모듈을 연결하여 배관을 이동 또는 회전함으로써 안정적으로 배관을 검사할 수 있는 환경을 제공한다.
기술분야
본 발명은 배관 외부 검사용 이동 로봇에 관한 것으로, 좀 더 구체적으로 이동과 회전 매커니즘을 통해 배관 외부에 부착 되어 곡관 또는 분기관을 이동하거나, 장애물을 회피할 수 있는 배관 외부 검사용 이동 로봇에 관한 것이다.
배경기술
산업이 발달함에 따라 자연스럽게 대형 구조물들이 우리 주변에 차지하는 비율이 매우 증대하였으며, 이와 더불어 유지 및 보수 작업의 필요성 또한 증대되었다.
예를 들면, 다리, 컨테이너 선박, 대규모 석유화학 플랜트, 원자력 발전소 등의 대 형 구조물들이 지속적으로 증가하면서, 이러한 대형 구조물들의 안전과 그 성능에 대한 검사 및 유지 보수의 필요성 또한 주요한 이슈가 되었다.
그러나, 대형 구조물의 검사 및 유지 보수는 현재까지도 점검자가 직접 수행하는 방법을 적용하였다.
하지만 점검자의 안전성을 보장할 수 없을 뿐만 아니라 복잡한 구조를 가진 구조물에서 점검을 하기에 한계가 있다.
따라서, 점검자의 안전과 복잡한 구조를 가진 구조물의 주기적인 점검을 위해 대형 구조물의 구조를 오르고 내릴 수 있는 로봇이 개발되고 있다.
여기서, 대형 구조물을 오르내리는 등반 로봇의 주요 메커니즘은 구조물에 부착할 수 있는 부착 메커니즘과 부착 후 이동 하는 메커니즘이 있다.
등반 로봇의 부착 메커니즘으로는 자석을 이용한 자석형, 견인 장치를 설치하여 이동하는 견인형, 공기의 압력차를 이용한 진공 흡착형, 곤충의 발을 모방한 생체 모방형 등이 있다.
또한 이동 메커니즘으로는 보행형, 바퀴 형, 궤도형 등이 있다. 각각의 메커니즘의 장단점이 다르기 때문에 작업 환경에 맞는 방식을 적용해야 한다.
문제점
본 발명은 점검자의 안전 확보와 점검자의 접근이 어려운 원자력 발전소 내부에 설치된 배관과 산업용 플랜트에 설치된곡관이나 T형 분기관을 신속히 이동 가능하며 배관의 용접부를 점검할 수 있는 배관 외부 검사용 이동 로봇을 제안을 제공 하고자 한다.
따라서, 종래와 같은 문제를 해결하기 위해 본 발명의 목적은 적절한 부착 매커니즘을 통해 고소지역의 배관 외부를 이동하고, 회전을 통해 곡관이나 분기관을 이동할 수 있는배관 외부 검사용 이동 로봇을 제공하고자 한다.
또한, 본 발명의 다른 목적은 두 개의 동일한 모듈을 연결하여 배관을 이동 또는 회전함으로써 안정적으로 배관을 검사할 수 있는 환경을 제공하고자 한다.
또한, 본 발명의 다른 목적은 배관의 외면을 길이방향으로 이동하거나 또는 배관의 길이방향에 직교하는 방향으로 배관의 외면을 따라 회전함으로써 장애물 회피가 가능한 배관 외부 검사용 이동 로봇을 제공하고자 한다.
해결과제
상기 목적들을 달성하기 위한 본 발명의 배관 외부 검사용 이동 로봇은 배관의 외부를 이동하는 배관 외부 검사용 이동 로봇에 있어서, 부착력을 통해 상기 배관의 외면에 부착되고, 추진력을 통해 상기 배관의 외면을 따라 상기 배관의 길이방 향으로 이동하거나 상기 배관의 외면을 따라 회전하는 제1모듈 및 제2모듈, 하나 이상의 관절을 가지며, 상기 제1모듈 및 제 2모듈을 상호 연결하는 연결부재를 포함하고, 상기 제1모듈 및 제2모듈은 곡관 또는 분기관을 이동하는 경우 어느 하나의 상기 모듈이 상기 배관으로부터 이격되어 이동하는 것을 특징으로 한다.
그리고, 본 발명의 제1모듈 및 제2모듈 각각은 몸체, 상기 몸체의 양 측면에 연결되고, 상기 배관의 외면에 부착되어 상기 배관의 길이 방향으로 상기 몸체를 이동시키는 구동부재, 상기 몸체의 양 측면에 연결되고, 상기 배관의 외면에 부착되어 상기 배관의 외면을 따라 상기 몸체를 회전시키는 회전부재, 상기 몸체, 상기 구동부재 또는 상기 회전부재에 내장 되고, 상기 구동부재 또는 상기 회전부재가 상기 배관의 외면에 부착시키거나, 상기 몸체를 이동 또는 회전시키는 동력원을 제공하는 동력부재를 포함한다.
또한, 본 발명의 상기 제1모듈 및 제2모듈은 상기 제1모듈 및 제2모듈이 상기 배관을 이동하는 경우, 상기 회전부재가 상기 배관으로부터 이격되고, 상기 구동부재가 상기 배관의 길이 방향을 따라 이동하며, 상기 제1모듈 및 제2모듈이 상기 배 관을 회전하는 경우, 상기 구동부재가 상기 배관으로부터 이격되고, 상기 회전부재가 상기 배관의 외면을 따라 회전하는 것을 특징으로 한다.
효과
상술한 바와 같이,본 발명의 목적은 적절한 부착 매커니즘을 통해 고소지역의 배관 외부를 이동하고, 회전을 통해 곡관이 나 분기관을 이동할 수 있는 배관 외부 검사용 이동 로봇을 제공한다.
또한, 본 발명의 배관 외부 검사용 이동 로봇은 두 개의 동일한 모듈을 연결하여 배관을 이동 또는 회전함으로써 안정적 으로 배관을 검사할 수 있는 환경을 제공한다.
또한, 본 발명의 배관 외부 검사용 이동 로봇은 배관의 외면을 길이방향으로 이동하거나 또는 배관의 외면을 따라 회전함으로써 장애물 회피가 가능한 환경을 제공하고자 한다.
또한, 본 발명의 배관 외부 검사용 이동 로봇은 웜기어와 웜휠 또는, 볼나사를 이용한 부착 메커니즘을 복합적으로 적용 함으로써, 백래시를 줄이며 안정적으로 배관에 부착할 수 있는 환경을 제공한다.
본고는 [성균관대학교산학협력단] 문형필, 한상철, 이건욱 등의 발표자료를 요약한 것이다.